vscode支持ros2程序debug
前言
工欲善其事必先利其器!掌握合适的工具做事情往往事半功倍,虽然qtcreator也能调试ros2,但是不如vscode那么清爽、高效,特别是可以launch包
安装
下载
wget https://az764295.vo.msecnd.net/stable/1a5daa3a0231a0fbba4f14db7ec463cf99d7768e/code_1.84.2-1699528352_amd64.deb安装
sudo dpkg -i code_1.84.2-1699528352_amd64.deb打开
code .插件
在打开ros2工程前需要安装几个插件
- CMake
- CMake Tools
- Python
- Ros
- XML Tools
配置
c_cpp_properties.json
这个文件用于配置编译条件,我这里用的是foxy版本的ros2,其他版本可以参考着改
{
"configurations": [
{
"name": "Linux",
"includePath": [
"${workspaceFolder}/**",
"/opt/ros/foxy/include/**"
],
"defines": [],
"compilerPath": "/usr/bin/gcc",
"cStandard": "c99",
"cppStandard": "c++14",
"intelliSenseMode": "clang-x64"
}
],
"version": 4
}launch.json
这个文件用于启动ros2 package,target选项用于配置package运行脚本,一般用相对位置比较合适
{
// Use IntelliSense to learn about possible attributes.
// Hover to view descriptions of existing attributes.
// For more information, visit: https://go.microsoft.com/fwlink/?linkid=830387
"version": "0.2.0",
"configurations": [
{
"name": "ROS: Launch",
"type": "ros",
"request": "launch",
"target": "./install/aglidar_sdk/share/aglidar_sdk/launch/start.py"
}
]
}
settings.json
vscode的基本配置,关联一些cpp的库、其它文件类型
{
"editor.tabSize": 8,
"editor.rulers": [
100
],
"files.associations": {
"*.repos": "yaml",
"*.world": "xml",
"*.xacro": "xml",
"chrono": "cpp",
"cctype": "cpp",
"clocale": "cpp",
"cmath": "cpp",
"csignal": "cpp",
"cstdarg": "cpp",
"cstddef": "cpp",
"cstdio": "cpp",
"cstdlib": "cpp",
"cstring": "cpp",
"ctime": "cpp",
"cwchar": "cpp",
"cwctype": "cpp",
"any": "cpp",
"array": "cpp",
"atomic": "cpp",
"strstream": "cpp",
"bit": "cpp",
"*.tcc": "cpp",
"bitset": "cpp",
"codecvt": "cpp",
"complex": "cpp",
"condition_variable": "cpp",
"cstdint": "cpp",
"deque": "cpp",
"forward_list": "cpp",
"list": "cpp",
"map": "cpp",
"set": "cpp",
"unordered_map": "cpp",
"vector": "cpp",
"exception": "cpp",
"algorithm": "cpp",
"functional": "cpp",
"iterator": "cpp",
"memory": "cpp",
"memory_resource": "cpp",
"numeric": "cpp",
"optional": "cpp",
"random": "cpp",
"ratio": "cpp",
"string": "cpp",
"string_view": "cpp",
"system_error": "cpp",
"tuple": "cpp",
"type_traits": "cpp",
"utility": "cpp",
"fstream": "cpp",
"future": "cpp",
"initializer_list": "cpp",
"iomanip": "cpp",
"iosfwd": "cpp",
"iostream": "cpp",
"istream": "cpp",
"limits": "cpp",
"mutex": "cpp",
"new": "cpp",
"ostream": "cpp",
"shared_mutex": "cpp",
"sstream": "cpp",
"stdexcept": "cpp",
"streambuf": "cpp",
"thread": "cpp",
"cfenv": "cpp",
"cinttypes": "cpp",
"typeindex": "cpp",
"typeinfo": "cpp",
"valarray": "cpp",
"variant": "cpp"
},
// Autocomplete from ros python packages
"python.autoComplete.extraPaths": [
"/opt/ros/foxy/lib/python3.8/site-packages/"
],
// Environment file lets vscode find python files within workspace
"python.envFile": "${workspaceFolder}/.env",
// Use the system installed version of autopep8
"python.formatting.autopep8Path": "/usr/bin/autopep8",
"python.formatting.autopep8Args": [
"--max-line-length=100"
],
"C_Cpp.default.intelliSenseMode": "clang-x64",
"C_Cpp.formatting": "Disabled",
"uncrustify.useReplaceOption": true,
"uncrustify.configPath.linux": "/opt/ros/foxy/lib/python3.8/site-packages/ament_uncrustify/configuration/ament_code_style.cfg",
"cSpell.words": [
"RTPS",
"athackst",
"autopep",
"cmake",
"cppcheck",
"cpplint",
"deque",
"devcontainer",
"ints",
"noqa",
"pytest",
"rclcpp",
"rclpy",
"repos",
"rosdistro",
"rosidl",
"uncrustify",
"xmllint"
],
"search.exclude": {
"**/node_modules": true,
"**/bower_components": true,
"**/*.code-search": true,
"**/build": true,
"**/install": true,
"**/log": true
},
"python.analysis.extraPaths": [
"/opt/ros/foxy/lib/python3.8/site-packages/"
],
"cSpell.allowCompoundWords": true,
"cSpell.ignorePaths": [
"**/package-lock.json",
"**/node_modules/**",
"**/vscode-extension/**",
"**/.git/objects/**",
".vscode",
".vscode-insiders",
".devcontainer/devcontainer.json"
],
"ros.distro": "foxy",
"cmake.sourceDirectory": "/home/asensing/workspace/Asensing_LiDAR_ROS/aglidar_sdk"
}tasks.json
编译任务配置,debug需求的可以改成debug编译类型
{
// See https://go.microsoft.com/fwlink/?LinkId=733558
// for the documentation about the tasks.json format
"version": "2.0.0",
"tasks": [
{
"label": "build",
"detail": "Build workspace (default)",
"type": "shell",
"command": "colcon build --cmake-args '-DCMAKE_BUILD_TYPE=Debug' -Wall -Wextra -Wpendantic",
"group": {
"kind": "build",
"isDefault": true
},
"problemMatcher": "$gcc"
}
]
}调试
调试快捷键列表,基本就是Visual Studio那一套
| 序号 | 功能 | 按键 |
|---|---|---|
| 1 | 单步 | F10 |
| 2 | 单步进入 | F11 |
| 3 | 单步跳出 | Shift + F11 |
| 4 | 恢复 | F5 |
| 5 | 暂停 | F5 |
| 6 | 停止 | Shift + F5 |
| 7 | 重新运行 | Ctrl + Shift + F5 |
| 8 | 运行task编译工程 | Ctrl + Shift + B |
| 9 | 切换断点 | F9 |
| 10 | 前进 | Ctrl + Shift + - |
| 11 | 后退 | Ctrl + Alt + - |
| 12 | 运行 | Ctrl + Shift + D |
调试界面效果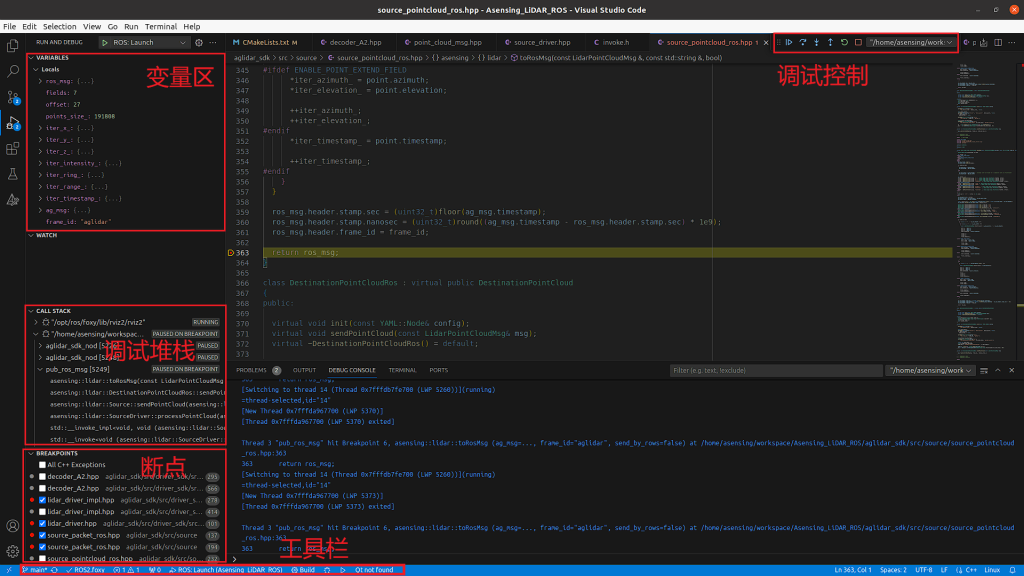
阅读剩余
版权声明:
作者:hywing
链接:https://iotstuff.cn/vscode-for-ros2/
文章版权归作者所有,未经允许请勿转载。
THE END



