LidarView工程搭建指南
前言
笔者做过一段时间的车载LiDAR开发,对开源项目进行过深度定制,摸索了一套LidarView软件的开发和调试方法
1 软件安装
1.1 安装准备
以Windows10系统平台为例,依次下载以下工具软件,软件(VS、Qt、cdb)的版本很重要!以下版本经过验证是没有问题的
| 序号 | 工具 | 版本 | 备注 |
|---|---|---|---|
| 1 | git | --- | 拉取开源仓库代码 |
| 2 | cmake | --- | 代码工程管理工具 |
| 3 | tortoiseGit | --- | 代码对比分析工具 |
| 4 | VisualStudio | 2017 | win10开发环境配置 |
| 5 | Qt5.12.9 | 5.12.9 | Qt环境安装 |
| 6 | cdb | 2017 | Windows调试器 |
| 7 | tly | --- | vpn工具,加快拉取代码速度 |
| 8 | Inno Setup Compiler | --- | windows平台exe打包工具 |
1.2 安装git
下载并安装最新版git
1.3 安装cmake
下载并安装最新版cmake
1.4 安装tortoiseGit
下载并安装最新版tortoiseGit
1.5 安装Visual Studio 2017
下载vs2017社区版在线安装包,可以在上面下载,安装以下组件

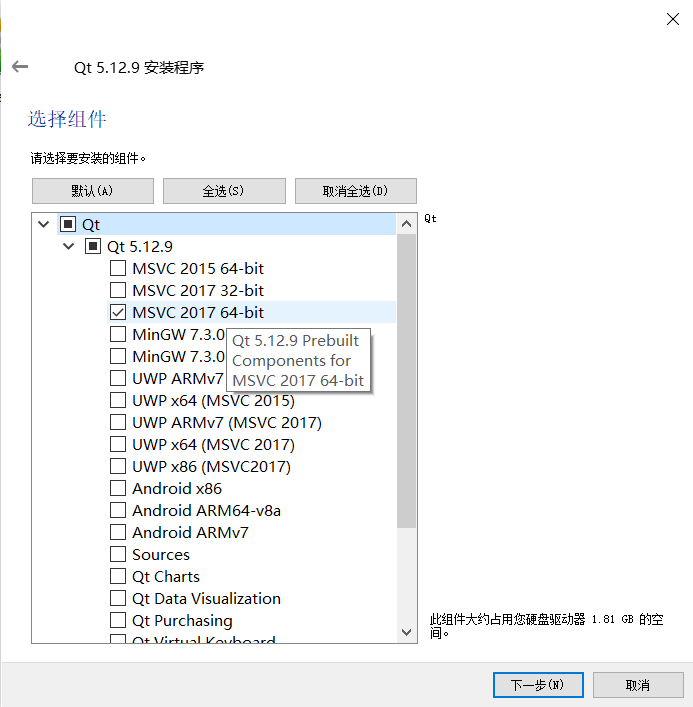
1.6 安装Qt5.12.9
去官网下载并安装
记得要把msvc2017勾选上
1.7 安装cdb
访问,下载winsdksetup
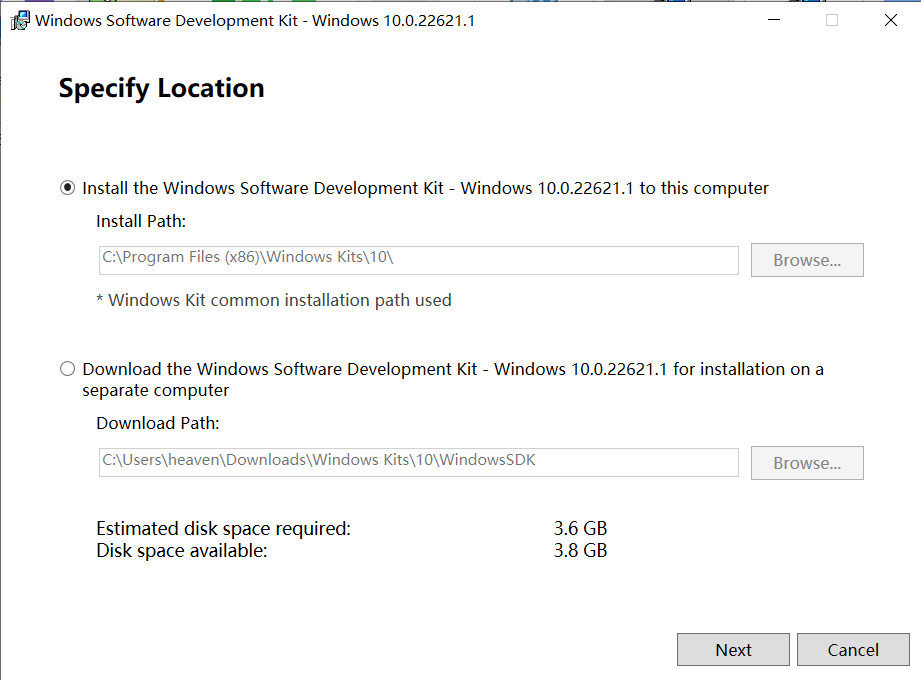
安装cdb是为了调试,这里通过winsdksetup的方式进行安装,选择第一个选项然后点击Next
选择Yes然后点击Next
同意(Accept)License Agreement
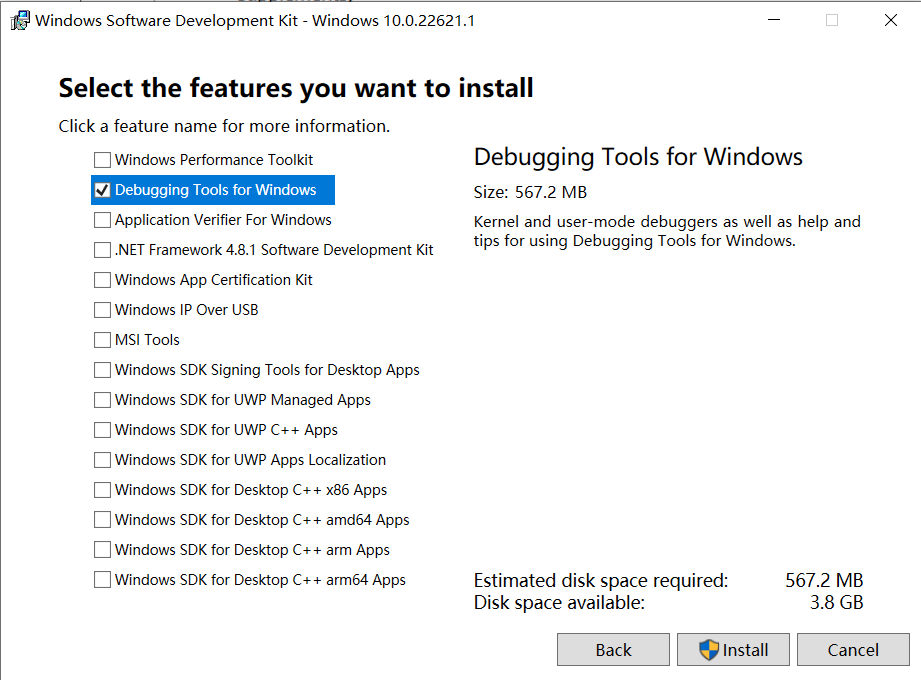
勾选Debugging Tools for Windows,点击Install
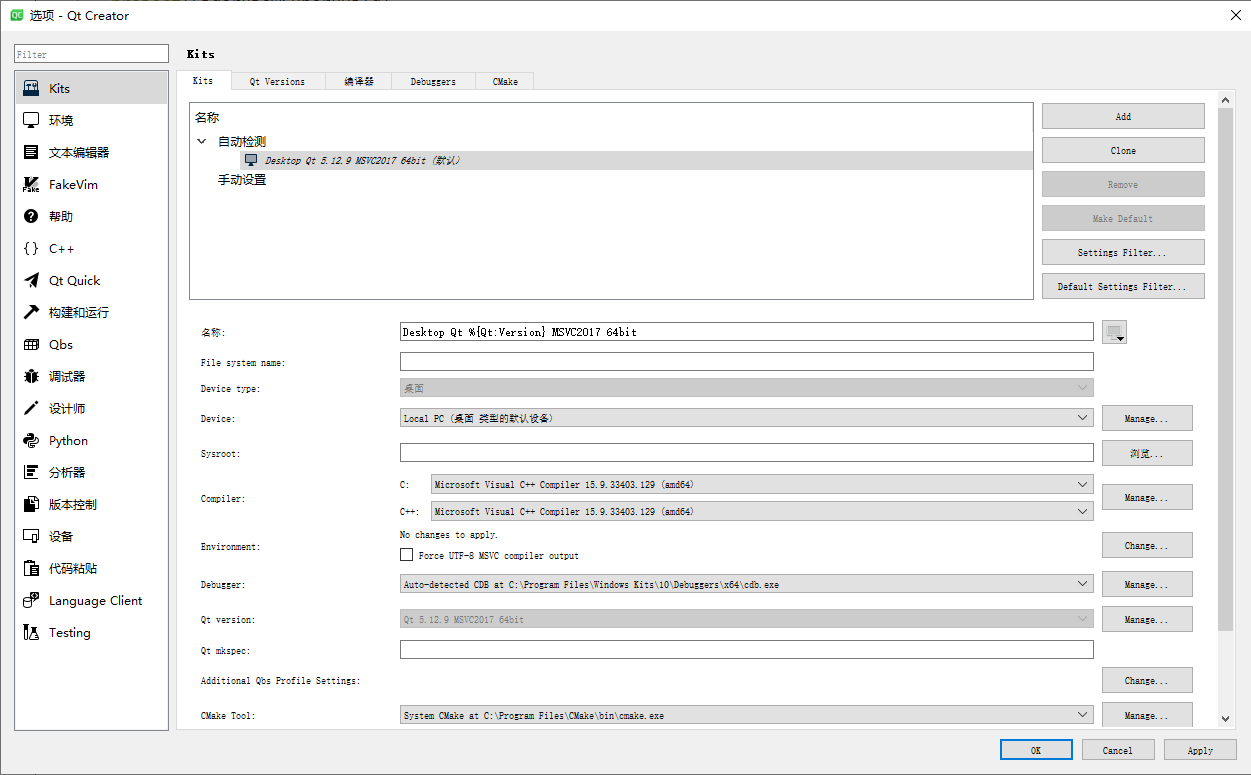
然后打开QtCreator Kits页面查看Debugger,发现QtCreator已经自动识别
1.8 安装tly
这个工具主要是为了加速,因为众所周知的原因,我们需要使用它,这里不详细介绍,当然你也可以使用其它加速工具
1.9 安装Inno Setup Compiler
请参考我的另一篇进行安装和配置
2 Superbuild工程配置
官方的代码仓库在gitlab,推荐使用这个源,工程地址是:https://gitlab.kitware.com/LidarView/lidarview.git
用git拉取代码
git clone --recursive https://gitlab.kitware.com/LidarView/lidarview.git
用QtCreator打开工程SuperBuild工程cmake文件,配置build类型(Windows目前只能支持RelWithDebInfo和Release模式)
set(CMAKE_BUILD_TYPE "RelWithDebInfo")
set(WITH_STATIC_LASZIP OFF)
set(SUPERBUILD_ALLOW_DEBUG ON)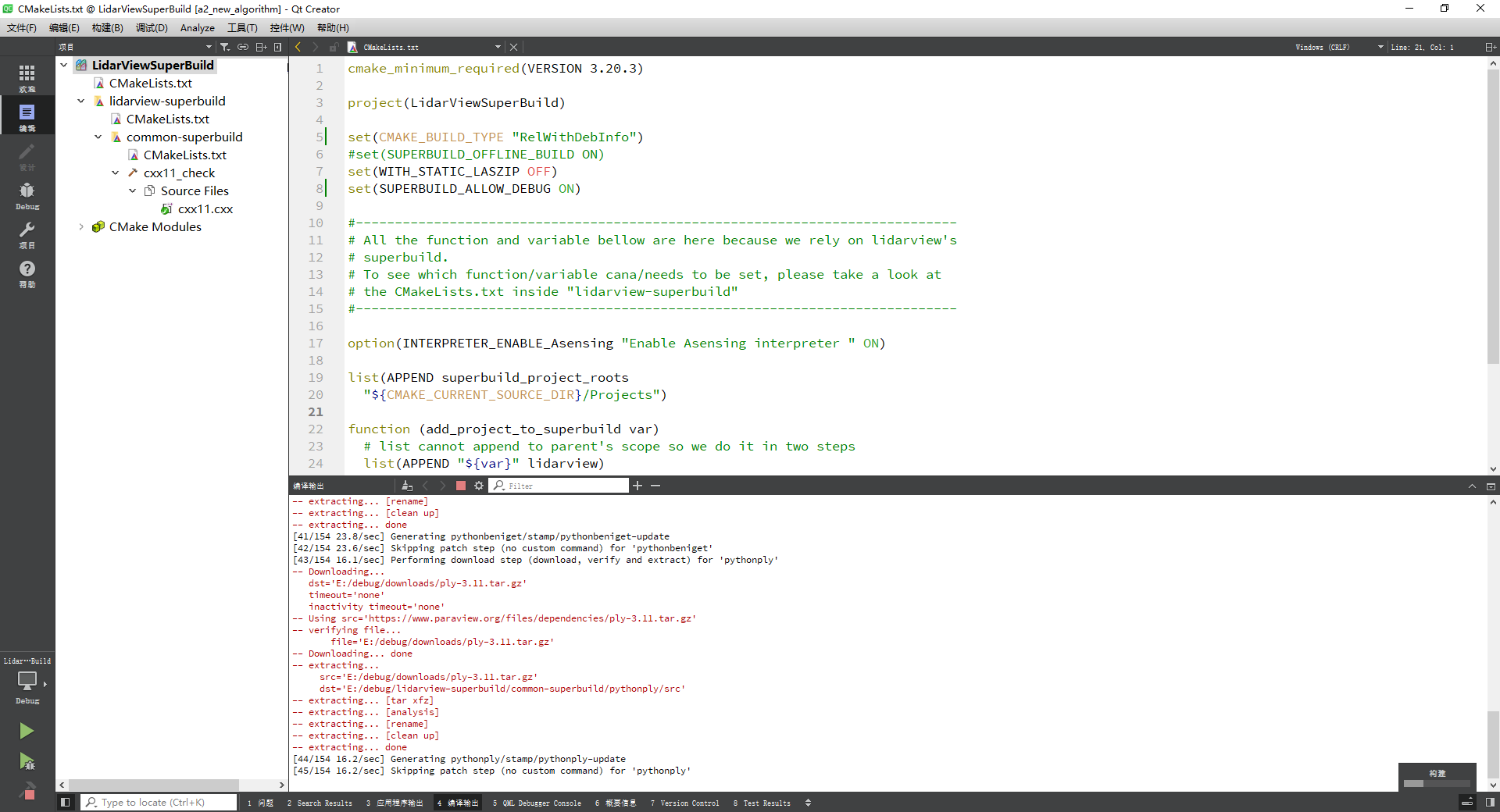
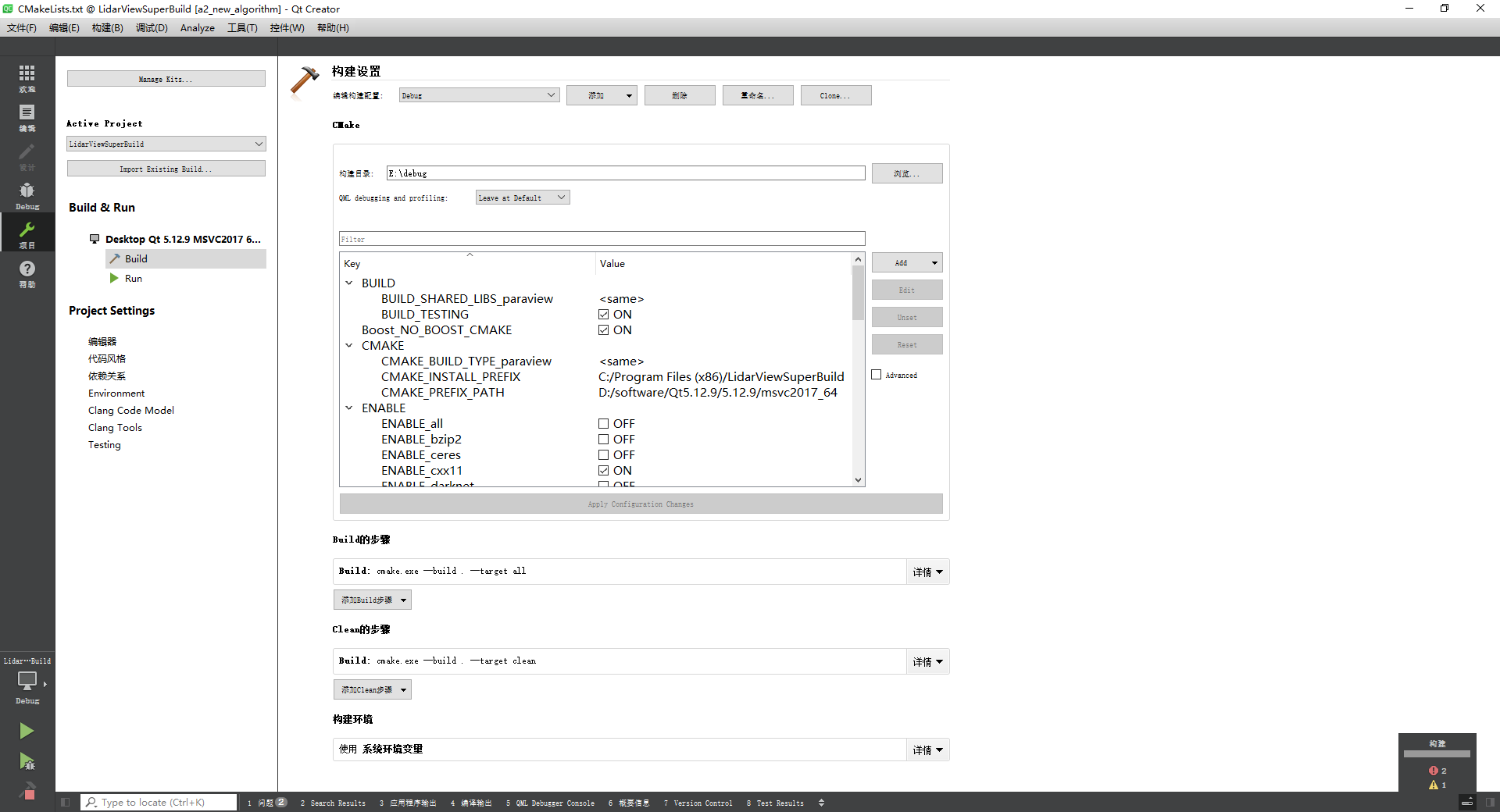
配置build路径,这里配置为E:\debug
3 LidarView工程配置
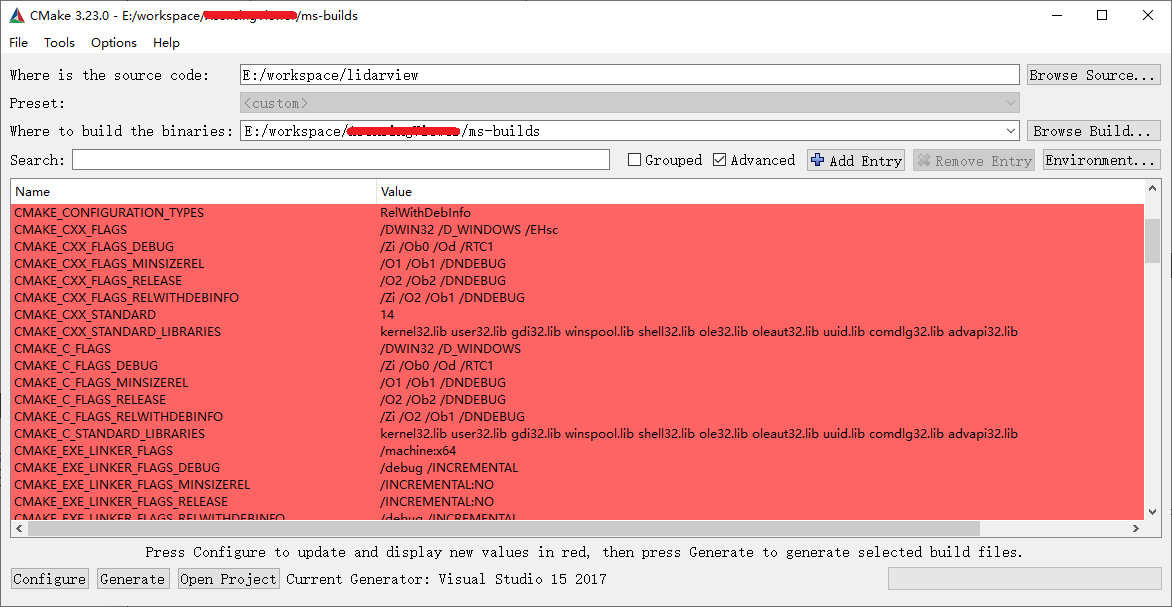
用cmake-gui打开LidarView工程顶层cmake,环境变量配置如下
| Variable | Value | Type |
|---|---|---|
| CMAKE_INSTALL_PREFIX | E:/debug/install | PATH |
| superbuild_python_version | 3.9 | STRING |
| paraview_version | 5.9 | STRING |
| Python3_EXECUTABLE | E:/debug/install/Python/python.exe | FILEPATH |
| ParaView_DIR | E:/debug/lidarview-superbuild/common-superbuild/paraview/build | PATH |
| Boost_USE_STATIC_LIBS | OFF | BOOL |
| Python3_LIBRARY | E:/debug/install/Python/libs/python39.lib | FILEPATH |
| Python3_INCLUDE_DIR | E:/debug/install/Python/include | PATH |
| PARAVIEW_PLUGIN_ENABLE_debugPlugin | ON | BOOL |
| PARAVIEW_PLUGIN_ENABLE_DatasetIOPlugin | ON | BOOL |
| PARAVIEW_PLUGIN_ENABLE_LidarPlugin | ON | BOOL |
| PARAVIEW_PLUGIN_ENABLE_PythonQtPlugin | ON | BOOL |
| PYTHON_INCLUDE_DIR | E:/debug/install/Python/include | PATH |
| PYTHON_LIBRARY_RELEASE | E:/debug/install/Python/libs/python39.lib | FILEPATH |
| Python3_LIBRARY_RELEASE | E:/debug/install/Python/libs/python39.lib | FILEPATH |
| LV_BUILD_PLATFORM | Windows-AMD64 | STRING |
| PCAP_LIBRARY | E:/debug/lidarview-superbuild/common-superbuild/pcap/src/Lib/x64/wpcap.lib | FILEPATH |
| CMAKE_CONFIGURATION_TYPES | RelWithDebInfo | STRING |
输入上面的配置后依次点击Configure、Generate,完成后点击Open Project,即可打开LidarView的VS2017工程,可以正常调试,缺陷就是Windows的堆栈信息不那么好用,其实是RelWithDebInfo模式的锅,想要完美的调试信息得用Linux下的Debug版本
4 软件打包
请参考我的另一篇进行软件打包操作
5 Linux版上位机
Ubuntu20.04上面可以编译LidarView工程,配置流程可以模仿Windows版的配置,Linux版可以完美支持debug模式,只需要把SuperBuild里边的cmake文件改一下就得了
set(CMAKE_BUILD_TYPE "Debug")
set(WITH_STATIC_LASZIP OFF)
set(SUPERBUILD_ALLOW_DEBUG ON)在Ubuntu里边用QtCreator直接打开cmake并配置步骤3中的环境变量即可(Linux的路径需要改一改)
参考
本人提交的issue:
如果你在前面的步骤2成功编译了SuperBuild工程,也可以用这个issue里边的方法配置QtCreator调试
注意事项
- build的路径不能太深,否则很容易编译失败
- 加速工具最好用上,否则太慢了
- 偶尔一两次莫名其妙的失败不算什么,多试几次就得了